- SLAM-алгоритмы: как роботы и дроны создают карты в реальном времени и ориентируются в пространстве
- Что такое SLAM и зачем он нужен?
- Основные типы SLAM-алгоритмов
- Классические алгоритмы SLAM
- Алгоритмы на основе фильтров Калмана
- Алгоритмы на основе графов (Graph SLAM)
- Технологии сенсоров в SLAM: что оно использует?
- Лазерные дальномеры (LiDAR)
- Камеры
- IMU (инерциальные измерительные блоки)
- Практическое применение SLAM-алгоритмов
- Автономные транспортные средства
- Роботы-уборщики и сервисные роботы
- Дроны и беспилотные летательные аппараты
- Перспективы развития SLAM-технологий
- Вопрос: Какие основные вызовы стоят перед развитием SLAM-технологий сегодня?
- Полезные ссылки и дополнительные материалы
SLAM-алгоритмы: как роботы и дроны создают карты в реальном времени и ориентируются в пространстве
В современном мире технология автоматизации и робототехники стремительно развивается, достигая новых высот в области картографирования и локализации․ Одной из ключевых революций в этом направлении стали SLAM-алгоритмы – системы, позволяющие роботам, дронам и другим автоматическим устройствам создавать карты окружающей среды и одновременно определять своё местоположение на этой карте в реальном времени․ Представьте себе: ваш робот-курьер уверенно движется по сложным городским улицам, а его встроенные системы постоянно обновляют карту района и знают, где он находится, без помощи GPS․ Как это возможно? Сейчас расскажем подробнее․
Что такое SLAM и зачем он нужен?
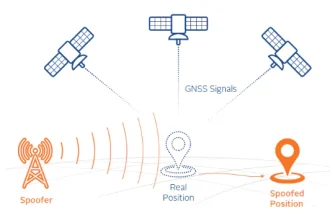
SLAM (Simultaneous Localization and Mapping) — это технология, которая позволяет одновременно создавать карту окружающей среды и определять свое местоположение внутри нее․ Эта задача очень сложная, потому что требует обработки огромного объема сенсорных данных в режиме реального времени и точного определения позиции без внешних систем навигации․
Для полноценной работы системы необходимо решить две задачи:
- Локализация — определить, где мы находимся на уже созданной карте․
- Картографирование — создавать актуальную карту окружающей среды․
Чем сложнее окружающая среда — например, мегаполис, лес, внутреннее пространство здания — тем сложнее реализовать эффективную систему SLAM․ Однако современные алгоритмы позволяют достигать высокой точности даже в самых сложных условиях․
Основные типы SLAM-алгоритмов
Существует множество различных подходов и алгоритмов SLAM, каждый из которых предназначен для конкретных задач и условий эксплуатации․ Рассмотрим наиболее популярные из них․
Классические алгоритмы SLAM
Эти алгоритмы основаны наvariants классических методов обработки данных и используют сведения, полученные с помощью лазерных дальномеров, стереокамер или лидаров․ Они хорошо работают в хорошо освещенных иструктурированных условиях․
Алгоритмы на основе фильтров Калмана
Идеально подходят для систем с предсказуемыми динамическими изменениями․ Они используют фильтры Калмана либо расширенные фильтры Калмана (EKF SLAM) для объединения информации от сенсоров․
Алгоритмы на основе графов (Graph SLAM)
Эти системы моделируют задачу в виде графа, где узлы — это состояния робота или окружающих объектов, а рёбра — связи между ними․ Такой подход позволяет достигать высокой точности и масштабируемости․
| Тип алгоритма | Преимущества | Недостатки | Примеры использования |
|---|---|---|---|
| Классические | Работают в структурированных средах | Меньшая точность в сложных условиях | Области промышленности и логистика |
| Фильтры Калмана | Быстрая обработка данных, надежность | Меньше подходит для сложных сред | Автономные транспортные средства |
| Graph SLAM | Высокая точность, масштабируемость | Более сложная реализация | Беспилотники, карды робототехники |
Технологии сенсоров в SLAM: что оно использует?
Основа любой системы SLAM, это сенсоры, собирающие информацию об окружающей среде․ В современных системах используют разнообразные датчики, каждый из которых обладает своими преимуществами и особенностями․
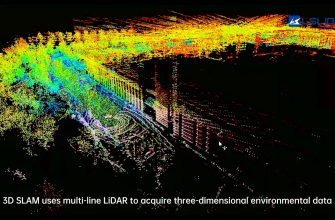
Лазерные дальномеры (LiDAR)
LiDAR-сканеры посылают лазерные импульсы и анализируют отражения, чтобы построить точную трехмерную модель пространства․ Эти устройства особенно популярны в автономных автомобилях и роботах, потому что дают высокоточную информацию о расстояниях и форме объектов․
Камеры
Используются для получения визуальных данных․ Сложная обработка изображений позволяет распознавать объекты, измерять расстояния с помощью стереозрения, а также создавать карты окружающей среды․ В современных системах применяют как цветные, так и глубинные камеры․
IMU (инерциальные измерительные блоки)
Датчики, фиксирующие ускорения и угловую скорость, помогают корректировать данные от других сенсоров и обеспечивают плавную локализацию даже при временном отсутствии внешних сигналов․
Практическое применение SLAM-алгоритмов
Системы SLAM находят применение в самых разных сферах, и в каждом из этих случаев они помогают решать уникальные задачи, повышая уровень автоматизации и эффективности процессов․
Автономные транспортные средства
Автомобили без водителя в крупных городах используют SLAM для ориентирования в дорожной ситуации, избегая препятствий и выбирая оптимальные маршруты․ Внутри салона такие системы помогают доставлять груз и управлять логистикой․
Роботы-уборщики и сервисные роботы
Эти устройства используют SLAM для навигации внутри зданий, обходя мебель, людей и другие препятствия, создавая внутренние карты помещений и зонируя пространство для эффективной работы․
Дроны и беспилотные летательные аппараты
Дроны используют SLAM для пролета в сложных условиях без GPS, например, в лесах, внутри зданий или при поисково-спасательных работах, создавая точные 3D-карты поверхности земли или интерьеров․
Перспективы развития SLAM-технологий
Область SLAM активно развивается, и будущие тенденции напрямую связаны с развитием сенсорных технологий, вычислительных мощностей и методов машинного обучения․ В ближайшие годы можно ожидать:
- Улучшение точности и скорости за счет новых алгоритмов и более мощных оборудования․
- Расширение области применения — например, в космических исследованиях или виртуальной реальности․
- Интеграцию с системами искусственного интеллекта для более автономных и умных роботов․
Рассматривая эти направления, можно уверенно сказать, что SLAM-алгоритмы займут ещё более значимое место в нашей жизни, делая роботов и интеллектуальные системы всё более самостоятельными и эффективными․
Вопрос: Какие основные вызовы стоят перед развитием SLAM-технологий сегодня?
Одной из главных проблем современных SLAM-систем является обеспечение высокой точности и скорости работы в сложных, динамичных условиях, где окружающая среда постоянно меняется․ Кроме того, важной задачей является снижение требований к вычислительным ресурсам для реализации алгоритмов на мобильных устройствах и роботах, а также разработка универсальных решений, способных эффективно работать в различных средах — как в городских условиях, так и внутри зданий или в природных ландшафтах․
Полезные ссылки и дополнительные материалы
Подробнее
| Как работают различные алгоритмы SLAM? | Какие сенсоры чаще всего используют в SLAM? | Как SLAM применяется в автотранспорте? | Что ожидает развитие SLAM-технологий? | Какие основные сложности и перспективы развития? |
| Как работает LiDAR? | Как используют камеры в SLAM? | Роль SLAM в робототехнике и автоматизации | Инновационные направления в SLAM | Какие вызовы сейчас существуют? |