- Планирование траектории облета препятствий: искусство навигации в сложном пространстве
- Почему важно планирование траектории?
- Основные принципы планирования траектории
- Методы планирования
- Современные технологии в планировании траектории
- Применение в различных отраслях
- Воздушное пространство и планирование полета
- Опасности и риски
- Безопасность в первую очередь
- Будущее планирования траектории
Планирование траектории облета препятствий: искусство навигации в сложном пространстве
Планирование траектории облета препятствий — это не только высокотехнологичное направление, но и искусство, требующее внимательности, анализа и, безусловно, опыта․ Мы, как блогеры, исследуем разные аспекты этой увлекательной темы, охватывающей различные сценарии применения: от дронов и автомобилей до робототехники и даже аэронавтики․ Знакомство с основной концепцией и инструментами, используемыми в этой области, поможет лучше понять, как современные технологии способны облегчать жизнь и повышать уровень безопасности․
В нашем сегодняшнем обсуждении мы перейдем от основ к более сложным концепциям, системам и методам, которые используются для эффективного планирования пути․ Давайте представим, что у нас есть дрон, задача которого — доставить груз в определенную точку, избегая различных препятствий на своем пути․ Этот процесс включает в себя множество этапов, начиная с визуализации пространства и заканчивая фактическим выполнением полета․
Почему важно планирование траектории?
Планирование траектории имеет значительное значение для различных областей науки и техники․ Основная цель — обеспечить эффективное и безопасное перемещение объектов в сложной и динамичной среде․ В современных технологиях, таких как беспилотные летательные аппараты, автомобили с автопилотом и различные роботы, разработка оптимальных маршрутов позволяет не только минимизировать риски столкновения, но и экономить время и ресурсы․
Кроме того, планирование траектории помогает значительно улучшить автономность системы, позволяя ей принимать решения в реальном времени․ Это особенно актуально в ситуациях, когда окружающая среда меняется, и требуется быстрая реакция на изменения․
Основные принципы планирования траектории
Существует несколько ключевых принципов, заложенных в процесс планирования траектории․ Рассмотрим некоторые из них:
- Определение среды: Необходимо получить информацию о пространстве, в котором будет осуществляться движение, включая размеры объектов и их расположение․
- Моделирование движений: Для успешного планирования важно не только понять, как объекты расположены, но и как они перемещаются․
- Анализ рисков: Методы выявления потенциальных опасностей помогают минимизировать вероятность столкновений․
- Оптимизация маршрутов: Процесс нахождения наиболее эффективного маршрута с минимальными затратами времени и ресурсов․
Методы планирования
Существует множество методов, применяемых для планирования траектории․ Мы выделим несколько наиболее распространенных:
- A* алгоритм: Один из самых популярных алгоритмов, который используется для поиска кратчайшего пути на графах․
- Dijkstra’s algorithm: Чем то напоминает A*, но оценивает только расстояние до целей․
- RRT (Rapidly-exploring Random Tree): Подходит для работы в сложных пространствах, где препятствия могут быть нерегулярными․
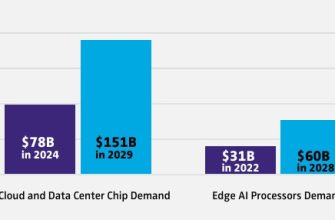
Современные технологии в планировании траектории
С развитием технологий искусственного интеллекта и машинного обучения, появляются новые перспективные инструменты для планирования траектории․ Использование данных с сенсоров, таких как LiDAR и радары, позволяет более точно оценивать окружающую среду и быстрее адаптироваться к изменениям․
Также необходимо отметить важность облачных технологий, которые позволяют управлять данными и алгоритмами в реальном времени, предоставляя пользователям и системам возможность получать актуальную информацию и принимать решения на основе аналитики․
Применение в различных отраслях
Планирование траектории находит применение в различных сферах деятельности․ Рассмотрим несколько примеров:
| Отрасль | Применение |
|---|---|
| Автопром | Автономные автомобили используют планирование траектории для безопасного движения по дорогам․ |
| Дроноведение | Беспилотные летательные аппараты пользуются алгоритмами для доставки грузов, обходя препятствия․ |
| Робототехника | Роботы кибернетики используют планирование для оптимизации своих действий в сложной среде․ |
Как использование технологий позволяет оптимизировать процессы планирования траектории?
Современные технологии, такие как искусственный интеллект и машинное обучение, позволяют собирать и анализировать большие объемы данных, что значительно улучшает качество планирования траектории․ Использование сенсоров обеспечивает возможность постоянного мониторинга окружающей среды, что позволяет в реальном времени оптимизировать маршрут․ Например, автономные автомобили могут моментально адаптироваться к изменяющимся условиям дорожного движения, выбирая наиболее безопасные и эффективные маршруты на основе актуальных данных․
Воздушное пространство и планирование полета
Планирование траектории в воздушном пространстве требует особого внимания и навыков․ Воздушный транспорт обладает своими уникальными требованиями, включая необходимость соблюдения высотных коридоров, максимальных и минимальных скоростей и эффективное реагирование на другие воздушные суда․ Это делает процесс значительно более сложным по сравнению с планированием на земле․
Опасности и риски
Несмотря на прогресс в области технологий, планирование траектории остается подверженным рискам․ Ошибки в расчетах могут привести к серьезным последствиям, таким как столкновения и аварии․ Именно поэтому необходима постоянная работа над совершенствованием алгоритмов и повышением надежности систем․
Безопасность в первую очередь
Для минимизации рисков необходимо внедрение многофакторного подхода, который включает:
- Регулярное тестирование: Оценка алгоритмов и систем на разных типах данных и в реальных условиях․
- Анализ ошибок: Работа с инцидентами для выявления слабых мест в планировании․
- Обратная связь: Внедрение систем, которые могут "учиться" на ошибках и улучшать свою производительность․
Будущее планирования траектории
С каждым годом планирование траектории становиться все более актуальным․ Мы стоим на пороге нового технологического прогресса, который откроет новые горизонты в этой области․ Ожидается, что с введением новых стандартов безопасности и повышения уровня автоматизации работа в этой сфере только станет более эффективной․
Появляющиеся технологии, такие как квантовые вычисления и расширенная реальность, способны кардинально изменить подход к планированию траектории, обеспечивая более точные расчеты и возможности для визуализации в реальном времени․ Это позволит не только улучшить безопасность, но и значительно снизить затраты, связанные с операциями․
Подробнее
| Планирование маршрутов для дронов | Алгоритмы А* | Оптимизация пути | Робототехника в городском пространстве | Автономные автомобили в будущем |
| Искусственный интеллект и планирование | Влияние LiDAR на навигацию | Технологии облачного хранения | Рынок беспилотников | Сравнение алгоритмов |