
- Анализ погрешностей в данных IMU: как повысить точность измерений и избежать ошибок
- Что такое IMU и почему важно учитывать погрешности
- Основные виды погрешностей в данных IMU
- Методы анализа и оценки погрешностей
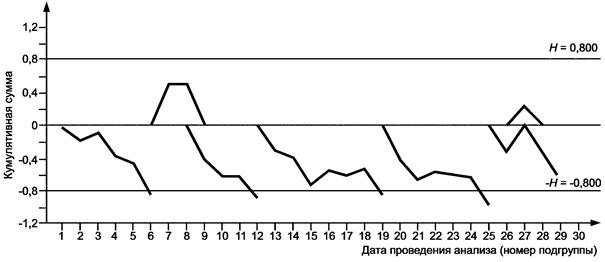
- Статистический анализ
- Моделирование погрешностей
- Инструменты и методы минимизации ошибок
- Таблица: Способы коррекции погрешностей и их особенности
- Практические рекомендации по анализу и исправлению погрешностей
Анализ погрешностей в данных IMU: как повысить точность измерений и избежать ошибок
В современном мире технологии навигации и ориентации все чаще используют устройства на базе инерциальных измерительных блоков (IMU — Inertial Measurement Unit). Эти небольшие, но очень важные компоненты позволяют определять положение и движение объектов без необходимости внешних сигналов, таких как GPS. Однако, несмотря на свою универсальность и удобство, данные IMU подвержены различным погрешностям, которые могут существенно искажать полученные результаты. В этой статье мы постараемся разобраться, как анализировать погрешности в данных IMU, какие типы ошибок бывают, и как минимизировать их влияние на конечную точность системы.
Что такое IMU и почему важно учитывать погрешности
IMU — это устройство, состоящее из гироскопов, акселерометров и иногда магнитометров, которые позволяют измерять угловую скорость, линейное ускорение и ориентацию объекта в пространстве. В большинстве случаев, именно эти параметры и используются для определения положения и скорости движущегося объекта. Однако, несмотря на свою технологическую сложность, IMU не является совершенным прибором. Каждый компонент внутри устройства имеет свою погрешность, которая накапливается при длительном использовании и влияет на точность системы в целом.
Корректное понимание типа погрешностей и методов их анализа, ключ к повышению надежности навигационных систем на базе IMU. Например, для задач робототехники, дронов или автономных транспортных средств очень важно минимизировать ошибки, иначе результат может оказаться недостоверным и даже опасным.
Основные виды погрешностей в данных IMU
Погрешности, сопровождающие работу IMU, делятся на несколько категорий, каждая из которых предстает в особом свете при анализе данных. Среди них выделяются:
- Шум измерений (random errors): случайные колебания, вызванные электроникой или внешней средой, влияющие на точность данных.
- Дрейф (drift): медленные изменения показаний, которые со временем накапливаются и искажают результат.
- Когерентный шум (bias): постоянная или медленно меняющаяся погрешность, которая проявляется, например, в гироскопах как постоянное смещение.
- Интегральные ошибки: ошибки, возникающие при численном интегрировании данных акселерометров или гироскопов для получения скорости или положения.
- Эффект клок-дерея (clock drift): рассинхрон по времени между компонентами системы, приводящий к ошибкам в синхронизации данных.
- Магнитные помехи (magnetic interference): искажения при использовании магнитометров в приборах, вызванные внешними магнитными полями.
Методы анализа и оценки погрешностей
Для эффективного контроля качества данных необходимо использовать различные методы анализа погрешностей. Среди них — статистические и математические подходы, а также эксплуатационные методы оценки ошибок в реальных условиях;
Статистический анализ
Один из наиболее распространенных подходов — анализ вариаций измерений с помощью статистических методов. Например, можно исследовать средние значения, дисперсию, стандартное отклонение и другие показатели, чтобы определить уровень шума. Для этого удобно строить гистограммы, использовать корреляционные функции и анализировать автокорреляцию.
Комплексный анализ помогает выявить сильные и слабые стороны системы, определить уровни погрешностей и разработать стратегии их устранения.
Моделирование погрешностей
Моделирование — это важнейший этап, позволяющий понять, как различные источники ошибок влияют на итоговые данные. Обычно используют модели, основанные на случайных процессах, такие как белый шум, дрейф и кросс-перезагрузки; Создавая такие модели, мы можем симулировать работу IMU в разных условиях, а затем разрабатывать алгоритмы фильтрации и коррекции ошибок.
На практике применяются такие методы, как фильтр Калмана, расширенный фильтр Калмана и алгоритмы сглаживания, которые позволяют снижать влияние погрешностей за счет предсказания и корректировки данных.
Инструменты и методы минимизации ошибок
Обнаружение и устранение погрешностей — это непрерывный процесс, основанный на использовании различных методов и алгоритмов. Ниже представлены основные стратегии и инструменты, которые помогают повысить точность данных IMU:
- Калибровка устройства: регулярное проведение калибровки для устранения систематических ошибок. Включает настройку нулевых уровней, измерение смещений и масштабных коэффициентов.
- Фильтрация данных: применение фильтров Калмана или агрегирующих фильтров для сглаживания шума и ошибок.
- Использование вспомогательных сенсоров: интеграция данных GPS, оптических датчиков или магнитометров для мультидатчикового уточнения данных.
- Обучение алгоритмов на данных: машинное обучение и нейронные сети позволяют автоматически выявлять и исправлять ошибки на этапе обработки данных.
- Техническая поддержка и регулярный мониторинг: важно следить за состоянием устройства и проводить профилактическое обслуживание.
Таблица: Способы коррекции погрешностей и их особенности
| Метод | Описание | Преимущества | Недостатки |
|---|---|---|---|
| Калибровка | Настройка устройства для устранения систематических ошибок | Высокая точность при правильной настройке | Требует времени и специальных условий |
| Фильтр Калмана | Адаптивная фильтрация данных на основе моделей состояния | Обеспечивает баланс между шумом и точностью | Может требовать сложной настройки и вычислительных ресурсов |
| Мультидатчиковая интеграция | Комбинирование данных с нескольких источников | Повышает надежность и точность | Усложняет систему и увеличивает расход энергии |
Практические рекомендации по анализу и исправлению погрешностей
Каждому специалисту, работающему с IMU, важно знать практические шаги, которые помогут снизить влияние ошибок и повысить качество данных. Ниже представлены важнейшие рекомендации:
- Регулярно калибруйте устройство — проведение калибровки перед каждым использованием существенно уменьшает систематические погрешности.
- Используйте фильтр Калмана, настройка и применение фильтра позволяют снизить уровень шума и дрейфа.
- Интегрируйте дополнительные источники данных — использование GPS, камеры и магнитометров в сочетании с IMU дает более полную картину о положении объекта.
- Обучайте алгоритмы на реальных данных — машинное обучение помогает автоматически распознавать и корректировать ошибки.
- Проводите тестирование в различных условиях, тесты позволяют понять поведение системы и определить слабые места.
Напоследок, важно помнить: не существует идеального устройства, и задача специалиста — максимально эффективно использовать имеющиеся инструменты для минимизации ошибок и повышения надежности системы.
Вопрос: Какие основные методы анализа погрешностей в данных IMU наиболее эффективны и почему?
Ответ: Наиболее эффективными являются статистический анализ и моделирование погрешностей, поскольку они позволяют выявить уровни шума, систематические ошибки и понять, как они влияют на итоговые результаты; Эти методы дают основу для разработки алгоритмов фильтрации и калибровки, что значительно повышает точность и надежность системы.
Подробнее
| Влияние погрешностей IMU на навигацию | Методы калибровки IMU | Использование фильтра калмана | Обучение нейронных сетей для коррекции данных | Интеграция данных с GPS и внешних сенсоров |
| Статистический анализ ошибок | Моделирование ошибок IMU | Тестирование систем в различных условиях | Примеры успешных кейсов | Лучшие практики эксплуатации IMU |
| Преимущества и недостатки методов | Создание моделей погрешностей | Настройка фильтров и алгоритмов | Диагностика и профилактика ошибок | Обновление и обслуживание устройств |







